 My philosophy when treating an injured runner is: How we run plays the biggest role in how we perform and how it feels.
My philosophy when treating an injured runner is: How we run plays the biggest role in how we perform and how it feels.
I’ve written my share here on iRunFar about running technique. Topics include:
- Alignment —Both general alignment and running-specific postures as the foundation for efficient landing and propulsion
- Mobility — Self-assessment and improvement strategies
- Strength — Both core stability and of the prime mover muscles (glutes, hamstrings, arms, to name a few)
But when considering how we propel ourselves while running — the specific strategies of how to move our limbs in the most efficient way — those pieces have been fewer. They include:
- Hip flexion — Driving the hip and leg upward
- Pawback — Pulling the leg beneath the body
- Plantarflexion — Pushing off using the foot behind the body
- Arm swing — How the arms, via the scapulae and trunk, complement and feed the legs
But a recent share by my colleague, friend, running physiologist, and gait expert, J.P. Gloria, DPT, struck a chord. When describing elite running form in a recent video, he noted that step length — the distance covered between one foot strike and the other — was the function of force production.
He said that step length “is largely influenced by how much force you produce into the ground. The more force produced by your legs into the ground, the farther forward you will go with each step.”

An airborne Ruth Croft powering forward during the 2016 The North Face Endurance Challenge 50 Mile Championships. Photo: iRunFar/Kirsten Kortebein
This certainly is true: A stronger leg force creates a greater ground reaction force. And like a rubber ball, the greater force we push into the ground, the greater the ground pushes back, delivering the energy to propel our body forward.
But harder isn’t always better, is it?
This line of thought renewed my interest into how we best move our limbs to generate such force. How we generate that force and how we direct that force may ultimately determine top speed, endurance, and sustainable (injury-minimizing) training and performance.
Moving Our Limbs Quickly Over a Distance Generates Force
When considering force generation, a few physics concepts are worth outlining:
- Velocity = Distance an object travels / Time it takes to travel
- Acceleration = Velocity change per unit of time
- Force = Mass of an object x Acceleration
Thus, to generate more propulsive force with limbs, we inherently need to move them faster.
(The other option in the force equation is mass. For all runners, a limb necessarily gaining weight would be less advantageous. While that weight may contribute to force production, it also increases the total load that must be propelled by that force. Thus, training to move the same limb faster is preferred.)
Distance secondarily plays a role in force production. The farther you can move a limb from start to impact, the more force can be generated. Consider the force generation of striking a punching bag with your fist. More force can be generated from a distance of two feet than two inches. There is more distance (and time) to generate force between the start and end positions of the movement.
This same idea applies to running. Larger limb movements — for both the legs and the arms — are more likely to generate larger forces than small movements.

Daniel Antonioli engages his arms to propel himself across the finish of the Grigne Skymarathon. Photo: Skyrunning
However, large-magnitude arm and leg movements are not necessarily ideal for all runners. Sprinters combine lightning-fast limb movements over enormous motion arcs — in both the arms and legs — to generate the force required to sprint at top speeds. But even sprinters begin to decelerate after only a few seconds of maximal-effort sprinting.
Since distance runners train and perform for long periods of time, a balance must be struck with both limb excursion — how far the arms and legs move — and the speed at which they move. Moderate limb excursion and movement speed seem to be ideal and what most elite distance runners demonstrate.
But once you generate force, where do you put it?
Direction Counts: Vectors Determine Efficient Force Application
Force is ultimately only as useful as our ability to apply it in the optimal direction. For efficient propulsion, runners need the following:
- Forward-oriented posture — Slight lean while in a hip-hinge position
- Hip flexion — Upward, forward lifting of the leg
- Hip extension — Rearward, downward pushing off of the leg
- Arm swing — Equal and opposite forward and rearward swing
This position and movement alone will generate forward propulsion: the body falls forward while the limbs move relatively forward and rearward.
But what is the best way to produce more force? And what is the best way to conserve that force, such that as much of it as possible is used for propulsion, and little is wasted or absorbed as excess tissue strain? The answer is to lift the leg upward and push it down as quickly as possible.
This, combined with a forward-oriented posture, creates optimal propulsion with a long, rearward stride without excess energy absorbed by the body. This is because force generation is only useful if it is oriented for forward propulsion, and greater stride length is only useful if that length is oriented behind the body and not in front.
The magnitude and direction of that hip-driven force is a unifying principle. In particular, a quick, downward hip extension torque facilitates three crucial aspects of efficient running: the longest possible stride, the most efficient underbody foot strike, and a quick cadence.

Huo-Hua Zhang, the 2022 Doi Inthanon Thailand by UTMB 100k men’s winner, demonstrates a strong, upward stride. Photo: Doi Inthanon Thailand by UTMB
Stride Length, Foot Strike, and Cadence Optimization Influence Hip Torque
Most investigative efforts on running efficiency center on injury prevention. And those efforts have traditionally focused on metrics like foot-strike pattern and, more recently, cadence. This is likely because these are two factors that are relatively easiest for runners to adjust: what part of the foot touches the ground and how quickly.
Lost in both the research and the application of foot strike and cadence is how we make those changes. Kinematics, how the body moves, is the outcome of kinetics, force production, and direction. It’s one thing to change what part of the foot we land upon or move the leg faster. But how we do that determines if that change enhances efficiency in the whole system.
A hip-driven strategy — a forceful upward lift and downward push — creates both a midfoot, underbody landing with a quick cadence and a powerful, rearward-directed force.
This force is considered torque because of its rotary nature: a combination of upward-and-forward (flexion) and downward-and-rearward (extension) rotation of the hip joint’s ball in its socket.
To fully comprehend this efficient force generation, it is useful to consider inefficient running strategies: techniques that might satisfy an enhanced foot strike and cadence but that don’t necessarily lead to optimal speed, endurance, injury prevention, and performance.

Emane Seifu Hayile, driving upward and forward to win the 2023 Nedbank Runified 50k. Photo: Richard Pearce Photography
“Shufflers and Pushers:” The Limitations of Unidirectional and Horizontal Force Production
The most common propulsive strategies I see in the clinic, as a coach, and on race courses utilize a horizontal propulsive strategy. Rather than lift up and push down, horizontal propulsive strategies either:
- Flex forward, a.k.a. shuffling
- Extend behind, a.k.a. pushing
While it’s possible to do both simultaneously, it’s more common for runners to employ one dominant strategy of either a horizontal flexion or extension.
“Shufflers” are dominant in a forward flexing of the leg. But rather than flexing upward, this strategy produces a long-lever, low-swinging pendulum. While a quick cadence is possible, it can take a lot of energy to quickly swing a long lever. As such, less force is produced in this strategy, and the stride length — and the ground covered — is shorter.
Shufflers are more likely to land mid-to-forefoot, the preferred strategy to avoid excessive joint loading forces, but they frequently overstride. They land that foot too far in front of the body and absorb too much energy.
A shuffler stride tends to create an elliptical shape of the legs during propulsion with a long horizontal movement but relatively little upward lift of the foot and leg.
“Pushers” are less frequently found in trail running and ultrarunning because this strategy is more energy-intensive. This strategy is punctuated by a strong rearward push driven by the knee and the ankle. Because pushers produce force using the hinge joints, they tend to look bouncy, with increased vertical oscillation — with the body moving up and down, most visible at the head — between push-off and landing. They, too, tend to have a flat, elliptical shape to their stride.
Pushers tend to have a long, powerful, and rearward stride, but they often also overstride in front as the straight horizontal rear force creates the reciprocal overreach in front. Pushers often are strong uphill runners but struggle more on the flats, where much energy is lost in vertical motion and overstride landing.
Pushers can create a lot of force and produce a generous stride length, but they often struggle with cadence. A long rearward and forward leg excursion takes more time and energy to reverse.
Below is a table outlining the different strategies and their pros and cons. Compared to the pushers and shufflers, the hip-driven strategy satisfies the most stride-efficiency objectives:
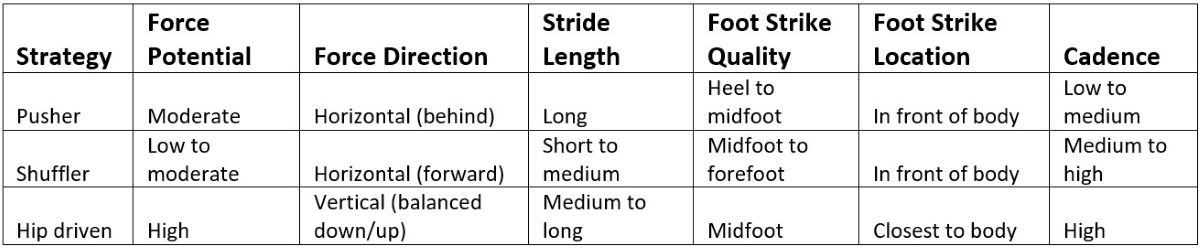
Table outlining different stride strategies.
Introducing a Hip-Driven Strategy
A hip-driven strategy is the most optimal because it:
- Generates the most force
- Orients that force in the direction for peak propulsion
- Creates the most energy-conserving foot strike
- Results in a fast cadence
Thus, a hip-driven strategy creates the most energy, with the least waste and with the quickest foot-to-ground cadence. Thus, it satisfies the efficiency rule to the utmost.
So how do we all do it?
1. Drive the Leg Upward, Not Just Forward
This was recently covered in our article on hip flexion. An upward force generation from the hip flexors does three key things: it complements a strong glute push-off, positions the leg to be able to land under the body, and cocks the hip-extension mechanism to push back to the ground.
2. Drive the Leg Downward, Not Just Rearward
Perhaps the least intuitive strategy for propulsion is a fast and strong leg-to-ground drive. Both a fast and strong air-to-ground attack of the leg creates several potent stride effects:
- Enhanced cadence — The limiting factor of cadence is how long the leg floats over the ground. An inherent fact for sprinters and their coaches is that speed is created by spending the least amount of time floating in the air! As such, a fast foot-to-ground force limits that float time.
- Enhanced force production via hip extension and stride length — When the flexed leg is powerfully driven downward to the ground, not only does the foot land quicker, but with more force. This creates more propulsive force and a longer, rearward stride length.
In short, more ground is covered more quickly.
3. Quick but Balanced Hip Action
Lastly, these motions should be both quick and balanced. The fast action is crucial to generate more force with a quick cadence.
But attention should be paid to making sure both the force — and the kinematic shape of the legs — is balanced. The leg (as indicated by the thigh) should extend relatively equally behind as the opposite thigh flexes forward. The distance between the two, hip separation, should be roughly balanced between the line of the trunk with not too much flexion and not too much extension.
This strategy — in particular, the fast, powerful, foot-to-ground attack — is so counterintuitive for most distance runners. The implicit belief is a longer, more flowy stride covers more ground with less stress. But objectively, that is not the case. Rather, more time and energy are wasted while floating through the air and in an overstride landing and the excessive braking forces that cause.
Instead, a quick, more vertically driven hip force is what generates the most propulsive energy with the least braking effect.
A hip-driven strategy also creates a more aggressive, circular stride aesthetic seen in ultrarunning’s top competitors, even in the late stages of 100-mile races.
Should We Pawback or Push Down?
Previously I promoted the idea of the pawback mechanism for enhancing foot-strike efficiency and hip-extension torque. And while I still find it useful as a drill, it has a few disadvantages compared to a strict foot-to-ground focus. This is because:
- The reaching component of straightening the leg in front prior to pulling beneath is more challenging to master and prone to overreaching
- It is more difficult to counterbalance with a strong, reciprocal flexion
- It can be overdone via overextending and thus become a pusher strategy
- While great for high speeds on flat ground, it is difficult to apply on hills or technical terrain
Exercise Strategies to Develop a Hip-Driven Stride
Adopting a hip-driven stride takes a strong hip complex. Both the hip flexors and extensors (glutes) must be strong about a stable trunk and pelvis.
After ensuring you have adequate hip mobility and deep abdominal activation, consider the following exercises to enhance hip flexion and extension strength. Note: the best, most specific exercises encompass reciprocal flexion and extension, simultaneously.
Open Chain Strategies
These are exercises where the legs are moving in the air and not engaging the ground. Two foundational exercises include:
Bike Pedal Abs
Lying supine on the ground, pedal the legs reciprocally flexed and extended. While this predominantly works on the core, it’s a powerful strategy to enhance hip flexion — especially when paired with band resistance.
Bent-Knee Extension
This is performed on all fours. While only one leg is moving at a time, this exercise works on a bent knee flexion wind-up, followed by a strong hip extension on a stable trunk and pelvis. Perform repetitions consecutively before switching legs.
Closed Chain Strategies
These exercises engage some part of the leg to the ground, which is more run-specific:
Abdominal March and Pushoff
This is more than a simple abdominal exercise. This mimics running by working both upward hip flexion and foot-to-ground pushoff, simultaneously.
To perform, lie flat on the ground with knees bent. As one knee begins to lift upward, push the stance foot into the floor through the ball of the foot. Flex the upward leg as high as you can without the spine leaving the floor. Then, maintaining spine-on-floor contact, scissor the legs simultaneously in mid-air. Then again, stance leg pushes while the flex leg achieves maximal flexion. Alternate to fatigue.
Single-Leg Bridge and Knee Drive
This exercise is the first grounded reciprocal, working both hip-extension push and hip-flexion drive. Lie on your back, with knees bent. Drive one knee upward while simultaneously pushing the pushoff leg into the ground through the ball of the foot. Drive quickly upward, then slowly lower and push into the ground. Perform repetitions consecutively before switching legs.
Standing Closed Chain Strategies
These exercises are also ground-oriented, but in standing.
Step Up with Knee Drive
This is a basic step-up but with hip-flexion intention. Step up on a moderate height stair or box that is high enough to challenge, but low enough to avoid loss of pelvic stability.
Cable Hip Flexion and Extension
This exercise involves using a cable pulley machine in the gym, or resistance bands at home. To work flexion, position the cable or band low. With it looped on the foot, drive the foot and knee upward and forward. Slowly lower. Emphasize a fast but controlled upward drive.
To work extension, position the pulley or band overhead. With it looped on the foot, drive the foot and leg downward and rearward. Slowly allow it to rise back up. Emphasize a fast but controlled downward and rearward ground attack.
100-Up Runner Hops
This run-specific exercise and drill is an ideal dynamic strategy for working the simultaneous upward drive and downward ground attack. Emphasize a very fast switch, but balance in the landing position for a full second before jump-switching.
Pre-Run Drills
These dynamic run drills work on aspects of the hip drive with forward movement.
Straight-Leg Pulls
This drill, while less stride-specific due to its straight-leg emphasis, is a great initial way to practice the quick, strong, foot-to-ground strategy.
A Skips
The A Skip is a classic runner drill emphasizing both the upward knee drive and fast, powerful, foot-to-ground landing.
Running Workouts Promoting Hip Torque
Strideouts
Also known as strides, these are usually 10-30 second, build-up sprints where the runner begins in a jog, then gradually speeds up to 80 to 95% effort.
The primary emphasis is both ideal posture and quick, strong hips: both a powerful, fast upward hip-flexion drive, as well as an equally powerful and fast foot-to-ground landing, beneath the body. Cadence should be maximal, as high as 200 to 240 steps per minute.
Sprint for 30 seconds or less, then walk or jog for one to two minutes before repeating (a total of four to 10 times).
Hill Sprints
Hills are also a great place to work on hip torque. The incline demands both a short, foot-under-body landing and a strong force from the extensors to generate enough power to propel quickly up a hill.
Similar to flat strides, hill sprints should be performed with both an efficient forward hip hinge, with powerful-and-fast upward hip drive and a fast foot-to-ground landing and pushoff. Also, like strides, cadence should be faster than normal.
Conclusion: Fast Running Comes From Powerful and Fast Hips
The takeaway: the key to fast, strong, and max-efficiency running is to move both the hips powerfully and quickly, and more vertically. Even in all-day endurance running, the less time the leg floats in the air, the less time and energy is wasted.
Push powerfully beneath, drive the hip powerfully upward and forward, and then get it quickly — did I mention powerfully?! — back to the ground! This will create the most energy with the least stress with the ideal cadence.
Good luck!
Call for Comments
- Do you think you have nailed the efficient stride techniques described in this article? Or have you room for improvement?
- What other advice would you like to see in this column?
